雾膜软件-大胡子刘师傅
(省流版)
(网站建设中,仅部分功能可用)
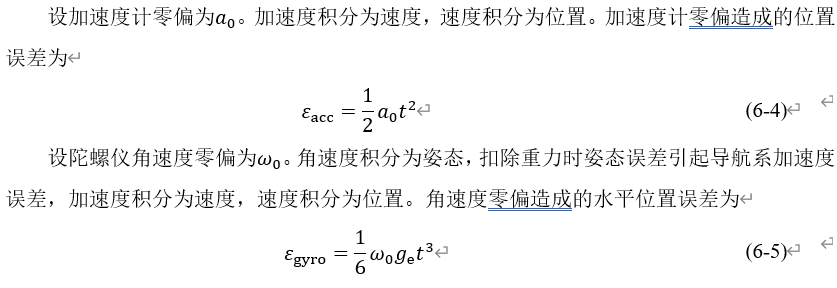
惯性导航的计算过程是积分过程,所以传感器的零偏会逐渐累积,产生误差。下面粗略估计惯性导航的误差。
上述两个简单的公式用于快速估计惯性导航误差,指导传感器初步选型。惯性导航完整的误差分析是比较复杂的。比如初始对准误差等,也会导致惯性导航结果误差。工程中更为方便的误差分析方法是制作导航仿真程序,在程序中设定误差后仿真计算导航结果即可评估误差。
下面给出惯性导航误差的参考数值。几十元级别的IMU,惯性导航位置误差典型值10秒10米;几十万元级别的IMU,惯性导航位置误差典型值100秒10米。当时间增加为10倍时,位置误差有可能增加至1000倍。所以低精度传感器的惯性导航只能维持非常短的时间,而维持长时间的惯性导航需要非常昂贵、非常精确的传感器。这是非常重要的结论,设计导航系统的技术人员需要对这个误差数值有直观感受。
市面上存在一些产品或演示视频,采用了额外的传感器或者其他特征进行修正,达到了较高精度,比如“零速阻尼”。这些产品可能宣传为"纯惯性导航",但是它们并不是真正的纯惯性导航。选用时应当注意甄别这种情形。
如需引用本文,请引用《组合导航应用笔记》,东南大学出版社,2025。
备案号