雾膜软件-大胡子刘师傅
(省流版)
(网站建设中,仅部分功能可用)
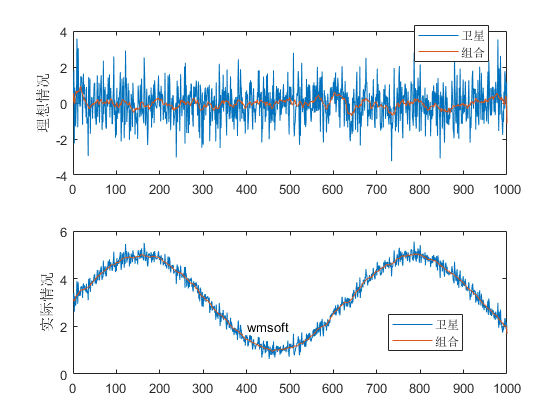
卡尔曼滤波是一种加权平均数,能起到平滑噪声的效果。对于惯性卫星组合导航,在理想情况下,如果卫星导航的误差是高斯噪声,那么组合导航误差的方差小于卫星导航误差的方差,组合导航比卫星导航精度更高。
但是实际的卫星导航的误差不是高斯噪声。一方面卫星导航结果与位置准确值之间存在绝对误差。另一方面,卫星导航接收机内部对卫星信号做了一些平滑处理,卫星导航接收机的输出结果是有色噪声。
在实际情况中,采用高精度IMU的惯性卫星组合导航系统,组合导航比卫星导航更加平滑,但是不能改善绝对位置误差。采用低精度IMU的组合导航系统,难以使得组合导航比卫星导航更平滑,组合导航与卫星导航精度大体相当。实际工程中,低精度组合导航系统的主要作用是提高导航数据更新率,而非提高精度。
如需引用本文,请引用《组合导航应用笔记》,东南大学出版社,2025。
备案号